基于上述问题,一些厂商开发了能对全站仪和GPS数据进行综合管理,可进行联合网平差等功能的软件。基本功能包括数据导入、可视化、转换、检核、处理、平差、报表生成、数据导出、坐标转换、GPS后处理、数据处理等模块可以帮助用户取得更好的工作效率。工作流程图如下:
三、数据传输、区分及数据格式
1.RS-232C接口
尽管现在一些先进的全站仪和GPS接收机配置了如USB接口、IR红外接口和数据存储卡等方式进行数据存储和通讯。但将测量数据存储在全站仪和GPS接收机自带的存储器中,通过RS-232C接口与个人计算机进行数据传输仍是目前使用最多的一种方法。
RS-232C是1969年电子工业协会(EIA)公布的标准,RS是推荐标准(recommended standard)的缩写。该标准的用途是定义数据终端设备(DTE)与数据通信设备(DCE)接口的电气特性。RS-232C接口在个人计算机通信中起着极为重要的作用。
一般个人计算机使用串口(9针D型连接器)与仪器进行通信,各引脚定义如下:
|
- |
名称 |
名称缩写 |
信号方向 |
说明 |
|
1 |
data carrier detect |
DCD |
从DCE至DTE |
数据载波检测 |
|
2 |
received data |
RXD |
从DCE至DTE |
接受数据线 |
|
3 |
transmitted data |
TXD |
从DTE至DCE |
传送数据线 |
|
4 |
data terminal ready |
DTR |
从DTE至DCE |
数据终端准备好 |
|
5 |
signal ground |
SG(或GND) |
|
信号逻辑地线 |
|
6 |
data set ready |
DSR |
从DCE至DTE |
数据设备(DCE)准备好 |
|
7 |
request to send |
RTS |
从DTE至DCE |
请求发送 |
|
8 |
clear to send |
CTS |
从DCE至DTE |
允许发送 |
|
9 |
ring indicator |
RI |
从DCE至DTE |
振铃指示 |
RS-232C的数据线有2根:发送数据线 TXD 和接收数据线RXD。与逻辑地线5结合起来工作,足以实现全双工和半双工的信息传输。信号是从DTE角度说明的,在DTE一方引脚2定义为TXD,引脚3定义为RXD。为了使DCE能很好地与DTE配合,协同进行发送与接收工作,在DCE一方引脚2定义为RXD,引脚3定义为TXD,为了能实现正确地传输,对这一点必须给予应有的注意。在使用RS-232C标准插头实现连接之前,用户必须根据已有的DTE及DCE的具体说明,做好匹配的调整工作。 对数据线上所传输的数据格式、RS-232C标准并没有严格的规定。所传输的数据速率是多少、有无奇偶校验位、停止位为多少、字符代码采用多少位等问题,应由发送方与接受自行商定,达成一致的协议。大多数全站仪使用6针接口与个人计算机进行通讯。我们以TOPCON GTS系列全站仪为例说明全站仪与pc机之间连接。GPS接收机与PC机通讯的原理也是这样。请注意仪器使用的接口类型与引脚定义方式要查一下,有些仪器厂商会使用非标准接口类型和定义方式,一般会在仪器操作手册附录里说明。
|
(GTS) |
|
(PC) |
|
GND |
(1) |
—— |
(5) |
GND |
|
N.C. |
(2) |
|
|
|
|
TXD |
(3) |
à |
(3) |
RXD |
|
RXD |
(4) |
ß |
(2) |
TXD |
|
(RTS) |
(5) |
匸 |
(8) |
CTS |
|
N.C |
(6) |
(6) |
DSR |
2.数据通讯
|
通讯参数 |
一般选项 |
说明 |
|
Baud Rate: |
1200/9600/38400baud |
波特率 |
|
Parity: |
NONE/ODD/EVEN |
检校 |
|
Data Bits: |
7/8 |
数据位 |
|
Stop Bits: |
1/2 |
停止位 |
|
Protocol: |
NONE/XON-XOFF/
RTS-CTS/ACK-NAK |
协议 |
简单的数据通讯可以采用“超级终端”来实现,“超级终端”是微软随操作系统一切发布的一个进行串口通讯的工具。操作系统是Win2000或WinXP的“超级终端”是标准配置,在Win95和Win98下要用系统安装盘安装一下。打开方式是:开始à程序à附件à通讯à超级终端,打开之后会弹出对话框让你输入一个名称,输入一个有意义的名字保存下来,这样以后直接打开它就行了,然后是选择通讯口,一般是COM1或COM2最后是选择通讯参数,记住一定要和全站仪中通讯参数的一致。
实际上各厂商都提供仪器与PC机进行数据传输的工具软件。这里仅以TOPCON TOOLS为例。可以看到,各通讯参数都很清楚地布置在窗体的界面上了,并且提供仪器操作说明。
3. 数据格式
全站仪数据输入PC机后以ASCII码文件形式保存。可以根据数据位及提示符区分并显示出来,各厂商都提供的数据传输的工具软件都有这一功能,一般在数据下载之后自动完成。
一般GPS接收机数据使用二进制文件形式保存,但各厂商对自己格式是保密的,如trimble使用*.dat,Ashtech使用B、E、S文件,TOPCON使用*.jps、*.tps,LEICA使用 *.tps等。如果要进行不同厂商GPS仪器”联合作业”需转换成Rinex格式。
三、平差
当今许多GPS数据处理软件都支持对观测值做最小二乘法平差处理,所不同的表现在对平差结果的分析功能上。GPS 控制网的观测值不是传统的边长和角度,而是通过载波相位的差分来进行的相对定位,相对定位的结果是两点间的三维直角坐标差以及他们的方差。两点间的三维坐标差(dX,dY,dZ)可以构成一个向量,我们称之为GPS 基线向量,或简称为GPS 基线。换言之,GPS 控制网就是由GPS 基线所构成的测量控制网。GPS 控制网的平差计算也就是以GPS 基线向量在WGS84 坐标系中的三维坐标差(dX,dY,dZ)为原始观测值的平差。GPS 控制网平差计算的目的,就是为了消除原始观测值之间的矛盾,发现并剔除粗差,求出各点在特定坐标系统中(北54,新北54,C80,或地方坐标系)的坐标值并评定精度。所以GPS 控制网的平差计算是指:以参加平差计算的基线的三维坐标差(dX,dY,dZ)以及它们的协方差阵(即权阵)为原始观测值的,以带权的观测值改正数的平方和为最小的,最小二乘平差计算各点坐标值。
在测区较小时,若全站仪数据与GPS数据不符,根据二者较差各改正一部分。
在测区较大时,控制网平差一般采用间接平差,对平面网可按“方向”或“角度”进行平差。较多地使用迭代法处理。
平差首先应定义单位权中误差等基本定权量,在迭代初次采用标称值。
全站仪观测值中误差:
1. 方向中误差:
一般为测角中误差的1/sqrt(2)=0.707倍。可按相应的等级套算。如对四等网,方向中误差=0.707×2.4″=1.7″。
2. 边长中误差:
由固定误差和比例误差组成。一般取其标称精度值或经验值。
GPS观测值中误差:
也按测距仪方法算,由固定误差和比例误差组成。一般取其标称精度值或经验值。
初次平差后要剔除粗差将平差后单位权返代,再次平差计算。这样反复。当然要设1个迭代限制,比方说达到迭代次数(10次),或本次平差后单位权中误差与前次平差后单位权中误差之差小于先验单位权中误差的1/100。
四、坐标系统
全站仪数据是基于测量左手坐标系,而GPS数据是基于WGS-84(Word Geodetic System 1984)坐标系,不同于我国的北京54坐标系和国家80坐标系。
为了解决这个问题,常规方法是GPS待测点与已知地方坐标的城市控制网基线联测(基线越短越精确),通过网平差求解GPS待测点的地方坐标,但如果地方控制网不开放,就需要使用或开发软件进行坐标转换。确定转换方程的关键是根据已知参考点(两类坐标系的坐标值都精确确定)求解转换参数,常用方法为七参数法,常用模型为布尔莎公式,而坐标转换的精度取决于已知参考点与待测点的几何关系。
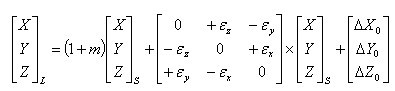
式中ΔX0、ΔY0、ΔZ0 为平移参数,εx、εy、εz为旋转参数 m为尺度比参数。对该公式进行变换等价得到:
解算这七个参数,至少要用到三个已知点(2个坐标系统的坐标都知道),采用间接平差模型进行解算:
V=AX-L
其中: V 为残差矩阵; X 为未知七参数; A 为系数矩阵; L 为闭合差
解得七参数后,利用布尔莎公式就可以进行未知点的坐标转换了,每输入一组坐标值,就能求出它在新坐标系中的坐标。
五、输出
在作业过程中和完成作业后,软件还提供一个交互式浏览界面,以便掌握进程和精度,现在较新输出格式是: 所有项目的报告,包括平差报告按网页(HTML)表格形式设计的,并可以定义HTML报告的内容和格式非常清晰明了。
现在各厂商的后处理软件都支持对最终的坐标和观测值的多种GIS导出形式。如AutoCAD的*.dxf文件, Excel表格也可以将数据导出为自定义的文本格式。这样可以很方便地与各种其系统相链接。
六、结语
共同作业方法充分地体现了现代测量产品设计理念——协同作业。使用一个软件包、在一个项目中,同时完成对RTK数据、后处理的GPS数据和常规测量数据进行处理。这样,用户在组织施工时,有很大的自由空间,可以是动态,也可以是静态;可以是GPS,也可以是全站仪。而对所有这些数据的处理,只需在后处理软件中就可一次完成。“联合作业”后处理软件的独特设计,使数据的导入、检查和处理工作,既能做到高效快捷,又能保证质量可靠。数据的存储,采用可视化类数据库文件格式,用户可以很方便的查询、编辑或生成各种报告。
共同作业方法继保证了测量成果准确性、可靠性,又结合了GPS与全站仪作业各自的灵活性,区域性控制由GPS完成,局部高精度测量由全站仪来做。是一种较新的取长补短作业方法,使工作更高效可靠。
参考文献
[1] http://www.topconsurvey.com/software/topcontools.html
[2] Trimble Geomatics Office用户指南
[3] Leica Geo OfficeV1.0 release